一、实验目的
1.掌握机构运动简图的测量、绘制方法。
2.掌握平面机构自由度的计算方法。
3.分析平面机构的基本杆组。
二、突验设备和工具
1.机构模型或实物,品种应超过30种(建议从CQJ—A、B、E、F及D型中选用,C型作为课外科技活动用),数量应保证平均每人一件以上。
2.量具:钢板尺、卡尺。
3.学生自备:铅笔、草稿纸、橡皮、直尺或三角板、圆规。
三、 实验原理
1.机构运动简图
机构运动简图是表示机构运动特征与传动方案的简化图形。它是用简单的线条
和规定的符号代表构件和运动副,按一定比例尺绘制出个运动副之间的相对位置。
视图平面应选择平面机构的运动平面或与其平行的平面;用简单的线条和规定的符
号画构件和运动副时,应撇弃构件和运动副中与运动无关的形状及固连方式;机构的运动尺寸指各运动副之间的相对位置尺寸,初学者容易忽略的是各固定铰链、移动副的定位尺寸;机构运动简图的比例用μl表示:
μl=
如构件实际尺寸0.5m,简图中用50mm表示,则其比例尺μl=0.0lm/mm。
注意:μl与机构制图中的比例尺不同,μl是有单位的,计算式中分子、分母与机械制图比例尺中的相反。μl的单位用m/mm是为了与对机构作运动分析时的速度单位(m/s)、
加速度单位(m/s2)相对应,计算方便。
2.平面机构自由度计算公式:
F=3n, -(2P1+Ph)
式中,n为活动构件数;P1为低副数;Ph为高副数。
计算机构自由度时应注意:
(1)当m(m>2)个构件在同一处以转动副相连接,构成复合铰链时,共有(m-l)个
转动副。
(2)某构伴所产生的局部运动不影响其他构件的运动,则这种局部运动的自由度称局
部自由度。在计算机构自由度时,应将局部的自由度去除,产生局部运动的构件也不计。
(3)有些构件的运动副带人的约束对机构运动只起重复约束作用,称这种约束为虚约
束,在计算机构自由度时。应去除虚约束数,即将形成虚约束的构件和运动副去除。
3.基本杆组分析
任何机构都可看作是由若干个基本杆组依次联接于原动件和机架上而构成的。
基本杆组是不能再拆的最简单的自由度为零的构件组。2个构件带3个低副组成的
基本杆组称Ⅱ级杆组;4个构件带6个低副或6个构件带9个低副组成的基本杆组称Ⅲ级杆组;组成四边形的4个构件带6个低副或6个构件带9个低副组成的基本杆组称Ⅳ级杆组。
拆分杆组应从远离原动件处着手,先试拆n=2的Ⅱ级杆组;如若不可能,再试拆n=4或6的Ⅲ级杆组,最后试拆组成四边形的n=4或n=6的Ⅳ级杆组。剩下的是原动件和机架。拆分杆组时应注意:每拆下一个基本杆组后,剩下的仍应是一个自由度不变的完整机构。
同一机构中可以包含不同级别的基本杆组。把最高级别为Ⅱ级组的基本杆组构成的
机构称为Ⅱ级机构;把最高级别为Ⅲ级组的基本杆组构成的机构称为Ⅲ级机构。
对含有高副的平面机构进行结构分析时,可根据一定的条件,将高副虚拟地以低副来
代替(称“高副低代”),然后再对虚拟的低副机构进行分析。高副低代必须满足的条件是:
(1)替代前后机构的自由度完全相同。
(2)替代前后机构的瞬时速度和瞬时加速度完全相同。
4、测绘模型的机构运动简图及自由度计算(除D型外都没有给比例尺,仅供教师批改作业参考
1、CQJ-A模型机构运动简图及自由度计算
| 机构名称 |
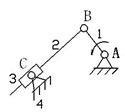
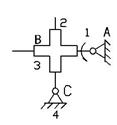
Al.曲柄摇块泵 |
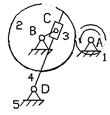
A2.转动导杆泵 |
A3.剪床机构 |
| 机构运动简图 |
|
|
|
| 自由度计算 |
F=3n,-(2P1-P-) =3x3-2x4=1 |
F=3n,-(2P1-P-) =3x5-2x7=1 |
F=3n,-(2P1-P-) =3x3-2x4=1 |
| 机构 名称 |
A4.浮动盘联轴器 |
A5.齿轮摆杆机构 |
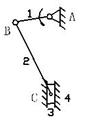
A6.曲柄滑块泵 |
| 机构运动简图 |
|
|

|
| 自由度计算 |
F=3n,-(2P1-P-) =3x3-2x4=1 |
F=3n,-(2P1-P-) =3x4-2x5-1=1 |
F=3n,-(2P1-P-) =3x3-2x4=1 |
| 机构名称 |
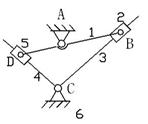
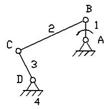
A7.曲柄摇杆泵 |
A8.摆动导杆泵 |
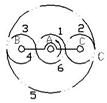
A9.差动轮系机构 |
| 机构运动简图 |
|

|
|
| 自由度计算 |
F=3n,-(2P1-P-) =3x3-2x4=1 |
F=3n,-(2P1-P-) =3x3-2x4=1 |
3与2中有一个为虚约束 F=3n,-(2P1-P-) =3x4- (2x4+2) =2 |
| 机构名称 |
Al0.齿轮直线机构 |
|
|
| 机构运动简图 |

|
|
|
| 自由度 |
2与4间高副为虚约束。F=3n-(2P1-Ph) =3x3-2×4=1 |
|
|
四、实验步骤
1.转动原动件,使机构运动,观察机构运动传递情况及工作原理。
2.数出活动构件数目,确定运动副的类别及各类运劫副数目(转动副、移动副、高
副}
3.测量各运动副间相对位置尺寸,选定比例尺μl,并在草稿纸上画机构运动简图。画图时应先画出固定铰链中心点及移动副导轨中心线,然后再画其他运动副位置。
4.计算机构自由度,若有复合铰链、局部自由度和虚约束需指出,判断机构是否具有
确定的运动。
5.按拆分顺序,画出机构拆出的基本杆组图及原动件与机架,确定机构的级别。
6.按教师要求,每人测绘4~6个模型,草稿纸上的机构运动简图经指导教师检查通
瞻方可离开实验室,课后誊写实验报告。
